¿Se debe Considerar el Sistema de Detección de Fuego y Gas como una Función Instrumentada de Seguridad?
Para responder esta pregunta es necesario definir el Sistema de Detección de Fuego y Gas (SDFyG). Un SDFyG es aquel diseñado e instalado para proteger contra los riesgos de fuga de gas (combustible, inflamable o tóxico) y fuego dentro de áreas monitoreadas; capaz de detectar el evento peligroso en su etapa incipiente, permitiendo tomar medidas inmediatas para su control y mitigación. La efectividad de este sistema, según el reporte técnico ISA TR84.00.07 y el Handbook de SFPE, se basa en tres (3) factores principales:
- Cobertura de detección: Es la probabilidad que tiene el sistema de poder detectar el evento peligroso específico para el cual fue diseñado. Este factor es comúnmente descartado en las Funciones Instrumentadas de Seguridad (SIF), debido a que se da por sentado que el sensor tiene la capacidad de detectar la variable que está monitoreando (p.e. presión, temperatura, flujo, etc.), y solo fallaría en caso de problemas con la tubería de conexión, lo que usualmente es poco probable.
- Disponibilidad de seguridad: Es la probabilidad de que el sistema actúe durante una demanda y está asociada al hardware. Se calcula de forma similar a la Probabilidad de Falla en Demanda Promedio (PFDavg) de una SIF, pudiendo utilizar las técnicas presentadas en el reporte técnico ISA TR84.00.02 considerando las tasas de falla aleatorias de los elementos sensores, controlador de lógica y los elementos finales; así como, las arquitecturas utilizadas para cada grupo de elementos, períodos de prueba, entre otros.
- Efectividad de Mitigación: Es la probabilidad que tiene el sistema de reducir exitosamente las consecuencias del evento peligroso específico para el cual fue diseñado.
De conformidad con la norma IEC 61511: 2016, podemos decir que una SIF es aquella diseñada para alcanzar un Nivel de Integridad de Seguridad (SIL), con la intención de alcanzar y mantener un estado seguro para el proceso y trabajar en conjunto con otras capas de protección para la reducción de un riesgo específico.
En base a lo anterior, para que una Función de Seguridad (FS) del SDFyG pueda considerarse como una SIF, el mismo debe garantizar la detección del evento peligroso, alcanzar y mantener un estado seguro del proceso, estar definida para un riesgo en específico, tener asociado un SIL y, adicionalmente, debe poder definirse la Especificación de los Requisitos de Seguridad (SRS) (tiempo de respuesta, fallos de causa común, requisitos para las prioridades / las inhibiciones / los desvíos, entre otros); tal como lo establece la norma IEC 61511: 2016.
Los puntos que realmente marcan la diferencia entre una FS del SDFyG y una SIF están referidas a la capacidad de detección y la efectividad para reducir el riesgo, debido a que en el caso de un SDFyG existen muchos factores que afectan estas características; por lo que, generalmente es difícil garantizar que un SDFyG alcance y mantenga un estado seguro del proceso, así como generar una reducción de riesgo equivalente al menos de SIL 1 (10 – 100).
Entre los factores que afectan la posibilidad de que el evento peligroso se encuentre dentro del área de detección de un SDFyG, están:
- Cambios en la dirección y velocidad del viento.
- Puntos de ignición inesperados.
- Objetos que desvíen el escape de material u obstaculicen el “campo de detección” del sensor.
- Cantidad suficiente o insuficiente del material asociado a la fuga (tamaño de la nube o de la llama).
- Inadecuado posicionamiento del sensor (distancia, altura, dirección e inclinación)
Algunos de los factores que influyen en la efectividad reducir el riesgo (o de la mitigación en este caso) son:
- Falla del sistema automático de extinción de incendios.
- Efectividad del método de extinción de incendios (polvo químico, agua, espuma, etc.).
- Ocurrencia de un evento peligroso mayor al esperado.
- Falla de la extinción manual de respaldo.
- Afectación y vulnerabilidad del personal durante el combate del incendio.
- Falla de la ventilación posterior a la extinción del incendio.
Para ilustrar lo antes dicho, presentamos un árbol de eventos con los factores que afectan el rendimiento de sistemas de detección de fuego y gas, considerando valores optimistas para la mayoría de los casos de detección, disponibilidad de seguridad y mitigación:
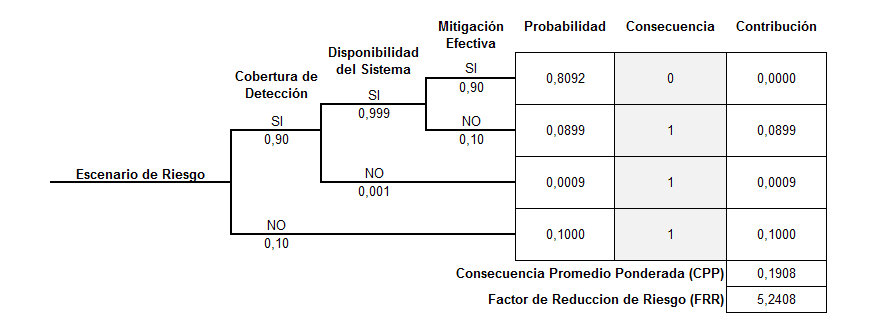
Tal y como se puede observar en el ejemplo, a pesar de usar equipos certificados y tener una disponibilidad de seguridad equivalente a SIL 2 (0,99 – 0,999), comúnmente obtenidos en el mercado, el factor de reducción de riesgos alcanzado por la FS del SDFyG es ligeramente mayor a 5, siendo menor que la banda inferior de SIL 1 (10 – 100). Este ejemplo refuerza lo antes dicho, es poco probable para la mayoría de los casos poder considerar las FS de los SDFyG como SIF, ya que es necesario que las mismas posean un nivel de desempeño elevado, el cual de acuerdo con los cálculos es una cobertura de detección y efectividad de mitigación superior a 0,90.
Sin embargo, existen excepciones en los cuales se podría considerar los SDFyG como SIFs, por ejemplo:
Una caseta de pintura, la cual impide la disipación de los gases inflamables y tóxicos, pudiendo alcanzar concentraciones potencialmente peligrosas dentro de la caseta. Una de las posibles acciones para proteger al personal contra este peligro, es tener un control de acceso, y alarma al detectarse altas concentraciones de gases inflamable y/o tóxicos. Es posible asumir que la cobertura de detección es cercana a 100% por encontrarse dentro de un área cerrada, y al realizar esta acción garantizaría que el personal no se vea afectado, siempre y cuando los dispositivos asociados al SDFyG funcionen de manera apropiada al momento de la demanda.
De forma general podemos decir que las funciones de seguridad asociadas a los SDFyG no deben ser consideradas como SIFs, salvo contadas excepciones, ya que los mismos no cumplen con todos los requisitos que exige la norma IEC 61511: 2016, siendo los más determinantes el no poder alcanzar y mantener el estado seguro del proceso; y la capacidad de detectar el evento peligroso específico para el cual se supone ha sido diseñado, lo que probablemente impedirá que alcance una reducción del riesgo en al menos un factor de 10 (SIL 1).
Se recomienda que los SDFyG tengan un Ciclo de Vida de Seguridad (CVS), dentro del cual el diseño sea realizado con un enfoque basado en desempeño. El usuario final debe garantizar que los mismos sean operados y mantenidos de forma que la reducción de riesgo que le ha sido asignada permanezca vigente durante toda su vida útil.